Vision
 Landschaft Grafik, ZALF, © infografik.pro / ZALF
Landschaft Grafik, ZALF, © infografik.pro / ZALF Digitalisierung & neue Technologien
Aufgrund intelligenter Messtechniken stehen mehr standortspezifische Informationen zur Verfügung. Diese Informationen könnten für eine bessere Planung der autonomen Pflanzenbaumaßnahmen und präzisen Pflanzenschutzmaßnahmen vor Ort verwendet werden, die in Zukunft von Robotern oder automatischen Traktoren durchgeführt werden können. Neue Entwicklungen in der Sensortechnik zur Erkennung von Schaderregern, Schadinsekten und Unkräutern sowie zur gezielten mechanischen Unkrautvernichtung ermöglichen es, den Einsatz von PSM in der konventionellen Landwirtschaft erheblich zu reduzieren oder sogar wegfallen zu lassen.
"Internet of underground Things" durch das LoRaWAN Bodensensoriknetzwerk
 LoRa Installation mit Lukas Metzger, © Clara Heilburg
LoRa Installation mit Lukas Metzger, © Clara Heilburg Auf allen 30 patches, die mit verschiedenen Kulturen bepflanzt sind, werden mit zwei Wiederholungen jeweils in den Tiefen 30cm, 60cm und 90cm volumetrischer Wassergehalt, Bodentemperatur und elektr. Leitfähigkeit des Bodenporenwassers gemessen. Dabei soll die Messtechnik die Bearbeitung der patches mit herkömmlicher Landmaschinentechnik nicht beeinträchtigen.
Dafür wurden im Herbst 2020 LoRaWAN-Knoten, die 6 Acclima TDR310H-Sensoren über SDI-12-Protkoll auslesen, in 30cm Tiefe vergraben. Die Stromversorgung über 3x D-Zellen ermöglicht einen Betrieb von ca. 1 Jahr. Die Messwerte werden von den Knoten an ein LoRaWAN-Gateway mit 4G-Modem übermittelt, das die Daten auf einen Server der UP GmbH weiterleitet, wo sie aufbereitet und visualisiert werden (Abbildung WebVis).
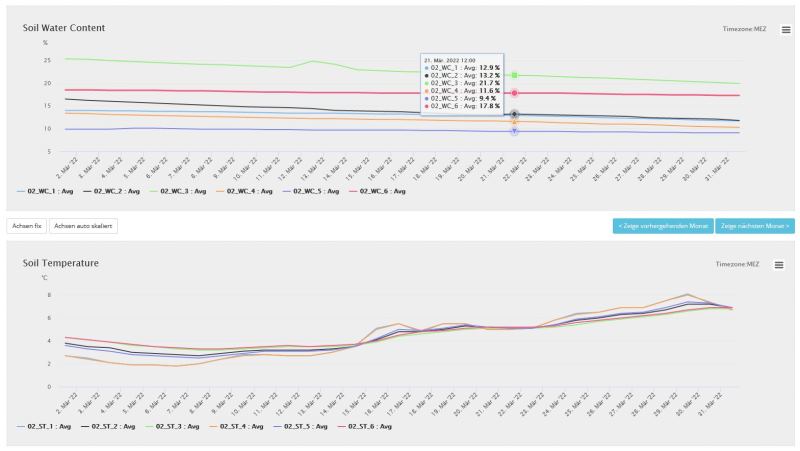 Abbildung WebVis: Grafischer Darstellung der Echtzeit- Messungen von Bodenfeuchtigkeit und Bodentemperatur in Patch 95; © Katrin Grahmann, ZALF
Abbildung WebVis: Grafischer Darstellung der Echtzeit- Messungen von Bodenfeuchtigkeit und Bodentemperatur in Patch 95; © Katrin Grahmann, ZALF Im Vorfeld der Installation wurde die Leistungsfähigkeit der Messwert-Übertragung getestet. Prinzipiell ermöglicht die LoRaWAN-Technologie die Datenübertragung über Entfernungen von bis zu 8km (freie Sicht), wobei nur relativ kleine Datenpakete übermittelt werden. Die LoRaWAN-Knoten und der SDI-12-Verteiler wurden in einer wasserdichten Box untergebracht und 30cm im Boden eingebaut.
Das Gateway wurde im unteren Drittel des Schlages auf einem der Blühstreifen aufgestellt – ein 100W-Solarmodul lädt einen 90Ah-Akku.
Neben den unterirdisch verbauten Bodenfeuchte-Temperatur-Sensoren wurden auf dem Gelände außerdem 10 Bodenfeuchte-Sensoren mit LoRa-Knoten vom Typ WC-EC-ST verbaut, die Messwerte aus den oberen 6cm des Bodens ermitteln und übertragen.
Die zwei auf dem Areal befindlichen Wetterstationen wurden im Herbst 2020 noch in das LoRaWAN integriert. Dazu wurden die vorhandenen Sensoren an einen Tekbox-Knoten vom Typ TBSL1 angeschlossen. Die Stromversorgung erfolgt über ein 5W-Solarmodul und einen Li-Ionen-Akku.
Die Messwerte der Acclima Multiparameter-Sonden (Bodenfeuchte, Bodentemperatur, elektr. Leitfähigkeit des Bodenporenwassers) laufen alle 20min auf dem UP-Server auf, die der Wetterstationen alle 15min.
Digitale Gelbschalen (Magic Trap)
Digitale Gelbschalen können ein optimales und effizientes Monitoring von Rapsschädlingen ermöglichen. Erste Tests wurden im Herbst 2020 mit 5 Prototypen der digitalen Gelbschalen im Raps durchgeführt. Hierfür wurden die Schädlinge Rapserdflöhe überwacht, sowohl mit digitalen als auch mit händischen Gelbschalen. Die Ergebnisse beider Methoden wurden dann miteinander verglichen.
 2nd generation digital yellow traps for rapeseed pests in 2022, © Emily Dovydaitis
2nd generation digital yellow traps for rapeseed pests in 2022, © Emily Dovydaitis Die DYT wurden sowohl in den drei Raps-Patches (installiert im permanenten Biodiversitätsquadranten) als auch den zwei Raps-Referenzflächen in benachbarten Schlägen aufgestellt. Das System basiert auf einem trainierten Algorithmus zur Bildanalyse mit numerischer und graphischer Klassifizierung und Mustererkennung. Dieser Algorithmus erkennt die bedeutenden Rapsschädlinge. Einige seltene Schädlinge können (noch) nicht erkannt werden: wie z.B. der Gefleckter & Schwarzer Kohltriebrüssler und der Echte Kohlschotenrüssler.
Das enge Zeitfenster der Messungen und der Überwachung erhöhen die Planbarkeit einer Pflanzenschutzmaßnahme. Der Nutzen der DYT beruht auf dem Vermeiden unnötiger Insektizidanwendungen dies führt:
- zu Ökonomisch fundierten Pflanzenschutzmaßnahmen
- zum Schonen von Nützlingen & Umwelt allgemein
- zur Entschärfung des Resistenzproblems
Das Design und der Algorithmus der DYTs sind weiterhin in der Entwicklung und werden stetig verbessert. Zudem gibt es die Möglichkeit, in der internetbasierten Monitoring-Auswertung einen Schädlingsradar zu aktivieren. Dieser stellt die im Umkreis befindlichen DYT anderer Betreiber dar, um mögliche Schadpopulationsdrücke bestimmter Schädlinge frühzeitiger zu erkennen.
Autonome Feldroboter
 Naio Roboter, © Felix Erbe
Naio Roboter, © Felix Erbe
Durch die Nutzung autonomer Feldroboter zur Aussaat und Pflege der Kulturen können die Saatreihen besser an die vorgegebene Struktur der Feldmosaike angepasst und etwaige Schäden durch unvermeidbares Überfahren von Pflanzen minimiert werden. Die geringere Traglast der im Vergleich zu bisher üblichen Maschinen deutlich kleineren Roboter schont den Boden. Zudem leisten Feldroboter für die mechanische Beikrautregulierung einen Beitrag zur Reduktion chemisch-synthetischer Pflanzenschutzmittel und könnten die Wirtschaftlichkeit dieser Maßnahme aufgrund der Automatisierung erhöhen.
In patchCROP wird der FarmDroid FD20 ab August 2023 sein Können im Anbau von Raps unter Beweis stellen. Der gleichnamige dänische Hersteller entwickelte das Modell ursprünglich für das Säen und Hacken von Zuckerrüben. Dank der Solarmodule und eines sehr geringen Energieverbrauchs, arbeitet dieser unter optimalen Bedingungen CO2-neutral und ohne längere Unterbrechungen. Durch die Berechnung der genauen Pflanzenposition anhand der Feldgeometrie, kann der FD20 in Kombination mit ausschwenkbaren Hackmessern auch den sonst schwer erreichbaren Bereich zwischen den Kulturpflanzen innerhalb einer Reihe (intra-row) von Beikräutern freihalten. Neben Raps sollen Möglichkeiten für die Anwendung in weiteren patchCROP-Ackerkulturen untersucht werden.

Farmdroid_V4, © Felix Erbe
Schon im Frühjahr 2022 nahm der erste Feldroboter in patchCROP seine Arbeit auf. Das Modell „Oz“ des Herstellers Naïo Technologies ist das kleinste seiner Art und fügt sich gut in die kleinskaligen Patches ein. Zu den Aufgabengebieten des Roboters zählt insbesondere die mechanische Beikrautregulierung. Für die Bewertung der Effektivität und Arbeitsleistung kommt Oz seither in der Maiskultur zum Einsatz. Zu den Werkzeugen gehören unter anderem Striegel, Hackschare und Torsionshacken. Darüber hinaus könnte in Zukunft auch die Aussaat verschiedener Kulturen von Oz übernommen werden. Die Batteriekapazität des ebenfalls rein elektrisch angetriebenen Roboters erlaubt je nach Last bis zu 8 Betriebsstunden.
Beide Maschinen steuern neben einem manuellen Modus autonom mit Hilfe von GNSS und RTK-Korrektur. Entsprechende Karten werden entweder durch die Roboter selbst aufgenommen oder aber durch Platzieren der GPS-Antenne und anschließender Softwarebearbeitung erstellt.
digi.farming.lab
 Naio Oz4 bei der Arbeit
Naio Oz4 bei der Arbeit Das
„digi.farming.lab”
 ist als virtuelles Landschaftslabor eine innovative Versuchs-, Vernetzungs- und Kommunikationsplattform. Es bietet die Möglichkeit, Lösungsansätze aus der Wissenschaft und Industrie mit Anforderungen aus der landwirtschaftlichen Praxis zu verbinden und lässt jeden Interessenten spielerisch die Landwirtschaft der Zukunft erleben. Das digi.farming.lab wurde vom ZALF in enger Kooperation mit dem Lehrstuhl für technisches Design an der TU Dresden im Videospiel Landwirtschaftssimulator entwickelt, um Feldversuche sehr realitätsnah abbilden zu können. Die Entwicklung begann im Jahr 2022. Auf der Grundlage von Satelliten und Drohnenaufnahmen wurde patchCROP zunächst möglichst detailgetreu nachgebaut und in die Spieleengine überführt, um einen digitale Zwilling des realen Felders zu erstellen. Auch Bodenparameter und Bewirtschaftungsreihenfolge wurden so realitätsnah wie möglich abgebildet. In Zusammenarbeit mit dem Agrarrobotikhersteller NAIO wurde der vom ZALF eingesetzte Agrarroboter NAIO OZ in das Spiel integriert.
ist als virtuelles Landschaftslabor eine innovative Versuchs-, Vernetzungs- und Kommunikationsplattform. Es bietet die Möglichkeit, Lösungsansätze aus der Wissenschaft und Industrie mit Anforderungen aus der landwirtschaftlichen Praxis zu verbinden und lässt jeden Interessenten spielerisch die Landwirtschaft der Zukunft erleben. Das digi.farming.lab wurde vom ZALF in enger Kooperation mit dem Lehrstuhl für technisches Design an der TU Dresden im Videospiel Landwirtschaftssimulator entwickelt, um Feldversuche sehr realitätsnah abbilden zu können. Die Entwicklung begann im Jahr 2022. Auf der Grundlage von Satelliten und Drohnenaufnahmen wurde patchCROP zunächst möglichst detailgetreu nachgebaut und in die Spieleengine überführt, um einen digitale Zwilling des realen Felders zu erstellen. Auch Bodenparameter und Bewirtschaftungsreihenfolge wurden so realitätsnah wie möglich abgebildet. In Zusammenarbeit mit dem Agrarrobotikhersteller NAIO wurde der vom ZALF eingesetzte Agrarroboter NAIO OZ in das Spiel integriert.